Table of Contents
Differential Equations

NARROW DISPLAY WARNING
You are most likely using a tablet or mobile device in portrait orientation. This website is best viewed using a typical computer screen with the browser window maximized.
Viewing this website in portrait orientation can cause problems with equations being longer than the screen width (you can scroll to the right), images being poorly sized, and the font size of maths text being much smaller than regular text. If your only option is a tablet or mobile device, your viewing experience will be better if you view this website in landscape orientation. You might need to refresh the page to fix any problems after rotating.
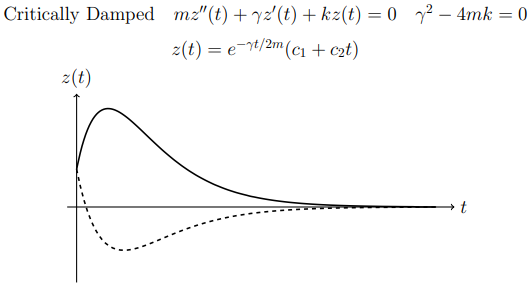
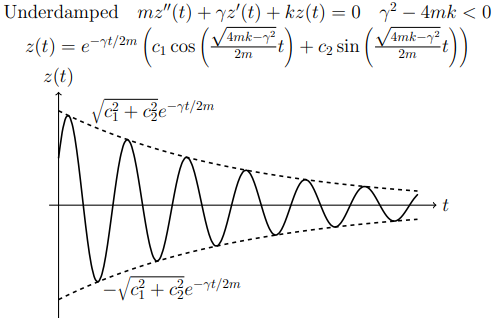
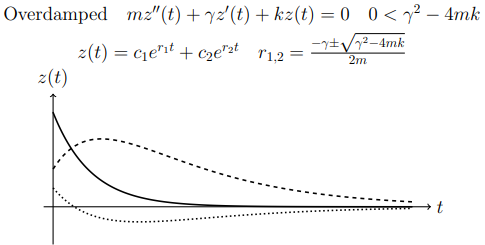
A mass-spring-damper with no forcing term has three solution behaviours called underdamped, overdamped, and critically damped. An underdamped system oscillates about the equilibrium and is slow to decay to equilibrium. An overdamped system decays to the equilibrium without oscillating. A critically damped system separates the underdamped and overdamped cases, and solutions move as quickly as possible toward equilibrium without oscillating about the equilibrium.
This is the imaginary root case. A practical application is airplane wings that oscillate can be made lighter versus a stiffer construction.
This is the two distinct real roots case. This is desirable in systems where overshooting could be disastrous, such as extremely large and heavy doors with built in dampers.
This is the case separating underdamped and overdamped at a specific damping coefficient relative to the mass and spring constant. This can be desirable in automobile suspensions driving over a bump so there are no oscillations but with minimum stiffness.